








Application Notes
Read to know how to use Vzense ToF cameras conveniently
-

AN28-Vzense 3D ToF camera usage guide and precautions for high and low temperature environments
This article introduces the methods and precautions for using the Vzense 3D ToF camera in high and low-temperature environments, as well as measures to reduce heat generation and improve heat dissipation efficiency.
-
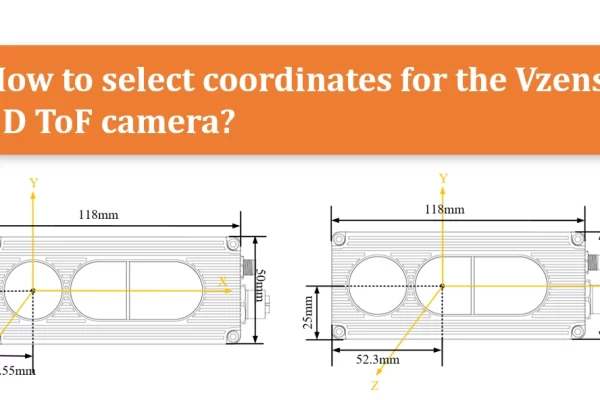
AN27-How to select coordinates for the Vzense 3D ToF camera?
In machine vision scenarios, the calibration between the camera and the robot affects the accuracy of the data. Therefore, selecting the correct camera coordinates is crucial. This article provides a detailed explanation of how to select the coordinates for the Vzense 3D ToF camera.
-
AN26-Frequently asked questions in Vzense ScepterSDK development
This article introduces the software ScepterSDK developed by Vzense, covering potential issues that may be encountered during use and their solutions. It aims to help users quickly identify the causes of problems and corresponding solutions during secondary development, thereby improving usage efficiency.
-
AN25-Vzense ScepterGUITool usage frequently asked questions
This article mainly introduces common issues and solutions for the ScepterGUITool developed by Vzense, helping users to locate the causes of problems more quickly and accurately during use, thereby enhancing the user experience.
-
AN24-Vzense DS series of Time of Flight (ToF) camera depth quality testing
This article introduces the depth quality testing of the DS series ToF cameras. Based on the test results, it is evident that the accuracy and precision of the DS series decreases with increasing distance and increases with longer exposure times.
-

AN23-Vzense NYX series Time of Flight (ToF) camera performance demonstration when capturing black objects
In 3D ToF imaging technology, the reflectivity of the measured target significantly affects the imaging results. This article primarily tests the imaging performance of the Vzense NYX series camera on black targets.
-

AN22-Vzense NXY series Time of Flight (ToF) camera performance demonstration in moving scenarios
3D Time-of-Flight (ToF) technology is well-suited for capturing moving targets and effectively resolves issues such as motion blur, making it increasingly popular in industrial 3D recognition applications. This article primarily introduces the imaging demonstration of Vzense ToF cameras in moving scenarios.
-

AN21-Vzense 3D Time of Flight (ToF) camera performance demonstration in bright light scenarios
ToF technology, which actively emits light, still faces some key challenges in practical applications. One of these challenges is the imaging performance of ToF technology under intense ambient light. This article primarily demonstrates the imaging performance of Vzense ToF DS86 and NYX650 cameras in capturing static objects under intense lighting conditions.
-
AN20-Vzense 3D Time of Flight (ToF) camera DS series vs. NYX series
This article mainly details the differences and respective advantages of DS series and NYX series. Through various scenario tests and demonstration results, users can gain a more intuitive understanding of the suitable scenarios for each series, which can better help users in selecting products according to their required scenarios.
-

AN19-Vzense 3D Time of Flight (ToF) camera parameter configuration method
This article introduces how Vzense’s ToF cameras generate parameter configuration files (.json files) and the methods for setting camera parameters. Vzense cameras have designed different ways to help users preset camera parameters, allowing them to freely set parameters according to their needs.
-
AN18-ScepterGUITool saving and viewing maps
This article explains how to use the ScepterGUITool to save depth images, IR images, and point cloud images, and which tools to use to view the saved images, making it convenient for users to view and utilize the obtained image information.
-
AN17-Vzense 3D Time of Flight (ToF) camera parameters summary and configuration recommendations
Different parameter configurations can result in varying performance for ToF cameras. This article summarizes the parameter definitions of the Vzense ToF camera and provides configuration recommendations for different application scenarios.
-
AN16-Intel Realsense D435 vs. Vzense DS86 comparison test
As machine vision technology continues to develop, the application of 3D cameras for object recognition and behavior recognition is becoming increasingly common. This article selects two products, Intel Realsense D435 and Vzense DS86, and evaluates the imaging effects of these two 3D cameras in different scenarios.
-
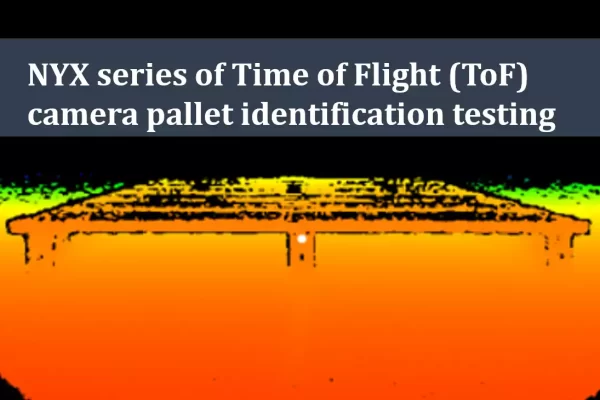
AN15-NYX series of Time of Flight (ToF) camera pallet identification testing
This article introduces the identification tests conducted on pallet made of different materials using the NYX series of ToF cameras, including black plastic pallet, blue plastic pallet, wooden pallet, and galvanized metal pallet. Various test conditions were set up to obtain different test results.
-

AN14-Vzense NYX series of Time of Flight (ToF) camera depth quality testing
This article introduces the depth quality testing of the NYX series ToF cameras. Based on the test results, it is evident that the accuracy and precision of the NYX series decreases with increasing distance and increases with longer exposure times.
-
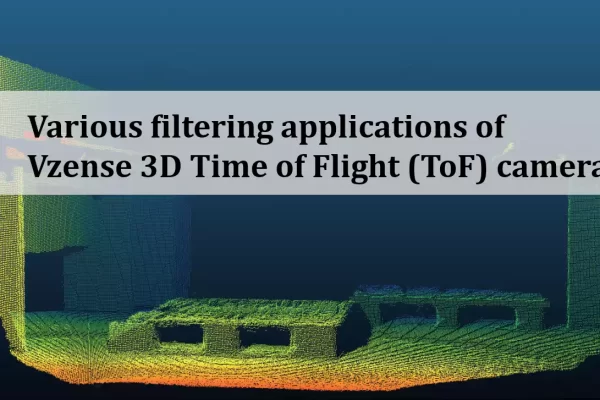
AN13-Various filtering applications of Vzense 3D Time of Flight (ToF) camera
This article introduces the application of four types of filtering, along with the implementation of API interfaces. The filter parameters can be adjusted, and appropriate thresholds need to be set according to the requirements of the actual scenario for application.
-
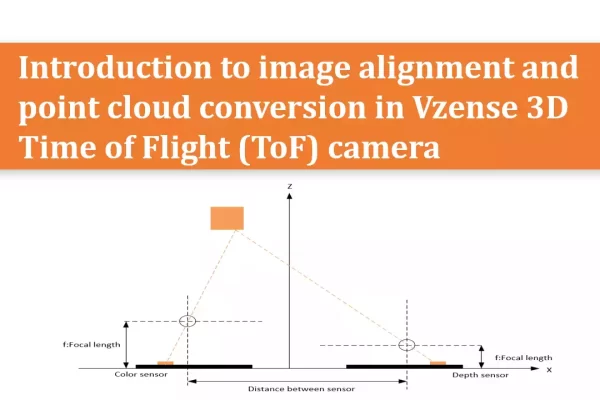
AN12-Introduction to image alignment and point cloud conversion in Vzense 3D Time of Flight (ToF) camera
This article introduces image alignment, which refers to the process of finding the same object in the world coordinate system within the images from both RGB color image sensors and depth image sensors through coordinate transformation.
-
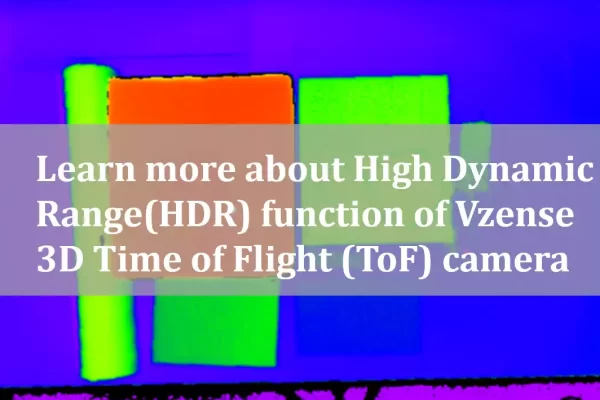
AN11-Learn more about High Dynamic Range (HDR) function of Vzense 3D Time of Flight (ToF) camera
This article is about HDR function test with various reflectivity objects. HDR function off, high reflectivity surfaces show significant exposure saturation. HDR function on, objects with both high and low reflectivity in the target area are well imaged.
-
AN10-The position and Field of View (FoV) of key parts in Vzense 3D Time of Flight (ToF) cameras
This article is about the field of view (FoV) and position of key optical parts (RGB lens, ToF lens and Lasers) in the camera, according which the user can mount and install the ToF camera correctly, including different PML DS86/DS87/NYX650/NYX660.
-
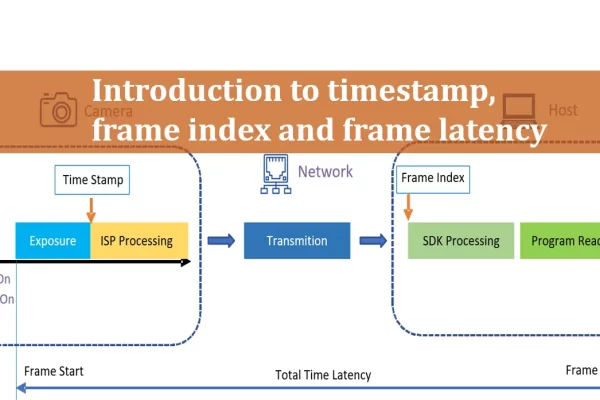
AN09-Introduction to timestamp, frame index and frame latency
This article describes the process of a single frame of image from the Vzense ToF camera from generation to transmission completion, including exposure time, image processing, network transmission, SDK processing, and application acquisition.
-
AN08-How to avoid multiple interference with each other in Vzense NYX series Time of Flight (ToF) camera?
This article introduces the trigger mode provided by the Vzense ToF camera, which allows coordinated control to enable multiple cameras to work simultaneously. It involves setting multiple cameras to trigger mode, with the main control platform managing the exposure start times of different cameras to ensure that they do not interfere with each other.
-
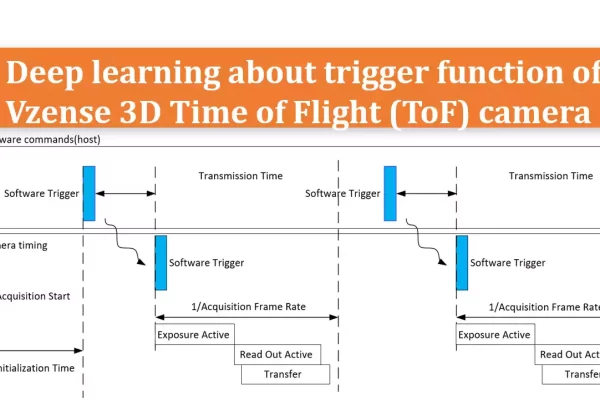
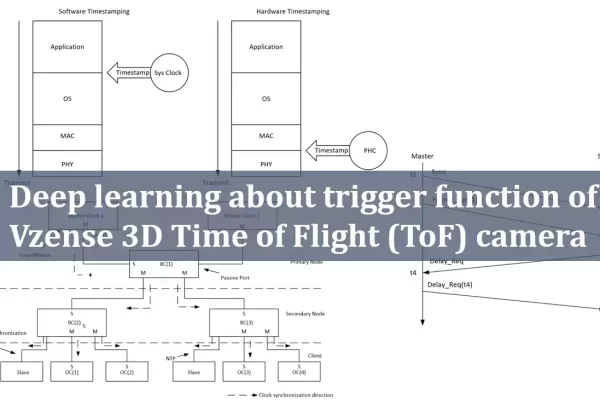
AN07-Deep learning about trigger function of Vzense 3D Time of Flight (ToF) camera
This article introduce the Vzense 3D ToF camera provide three operating modes: Active、Hardware Trigger and Software Trigger.In hard trigger mode, needing to configure a host compute and an external trigger source. Software trigger an image trigger can be carried out by calling the API.
-
AN06-PTP function settings for Vzense 3D Time of Flight (ToF) camera
This article introduce PTP, which is achieved by passing precise timestamps across the network. The master clock synchronizes with the slave clock by sending timestamp packets, and the slave clock adjusts its own clock by receiving and processing these messages.
-
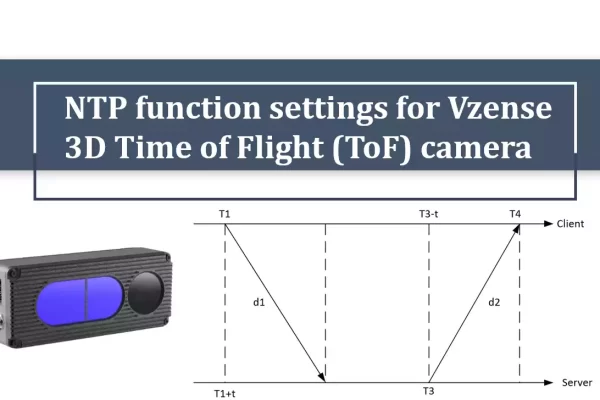
AN05-NTP function settings for Vzense 3D Time of Flight (ToF) camera
This article introduces a network time protocol (NTP) based on the UDP protocol for synchronizing computer system clocks. NTP uses a hierarchical structure to achieve time synchronization.



