Table of Contents
What is time filter?
The core principle of time filtering is inter-frame averaging, which is the weighted average of the current frame and the temporally adjacent frames to smooth the noise. Time filtering is usually low-pass filtering, Let us introduce a low-pass filtering calculation method-exponential moving average filtering. The exponential moving average algorithm allows one to assign different weights to different examples, the calculation formula is as follows:
X‘i = αXi + (1 – α)Xi-1
Comments:
X‘i: Output, the estimate of the i-th member of the time series (filtered signal).
Xi: Input, is the i-th member of the time series (noisy signal).
α: The smoothing factor.
In this algorithm, only the smoothing factor (α) parameter is configured, which takes values in the interval (0, 1). By decreasing, we reduce the noise, but at the same time we increase the lag.
Example of time filter application on Vzense ScepterGUITool
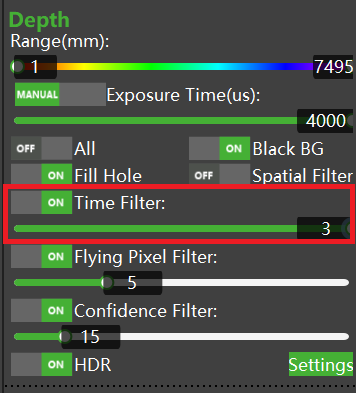
Users can enable/disable the time filter function on ScepterGUITool, please see below figure:
Detect the object with ToF(Time-of-Flight) camera, disable the time filter, and its point cloud map are shown below:
The time filter threshold ranges are [1, 3]. After enabling the time filter and the larger the threshold set by the user, the smaller the image jitter.
The below point cloud shows the samples with time filter threshold value is 3:
Pros and cons of time filter
Pros: The noise can be reduced and the image jitter is weakened.
Cons: Not suitable for moving scenes will produce motion blur.